报告详情
Posture Monitoring Method of Scraper Conveyor Based on Adaptive Extended Kalman Filter
编号:18
访问权限:公开
更新:2022-12-19 14:54:31
浏览:682次
张贴报告
报告开始:暂无开始时间(Asia/Shanghai)
报告时间:暂无持续时间
所在会场:[暂无会议] [暂无会议段]
暂无文件
摘要
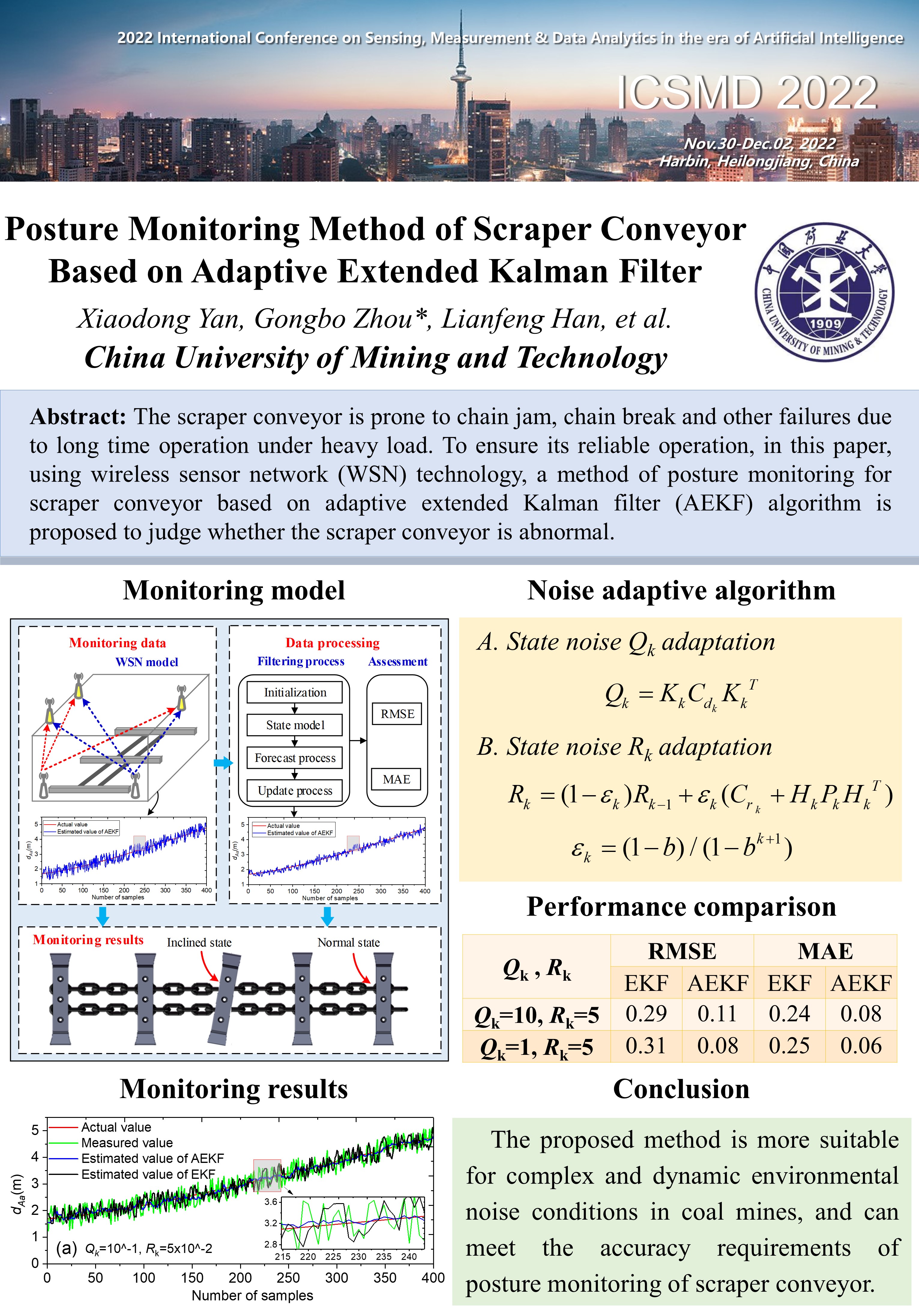
The scraper conveyor is prone to chain jam, chain break and other failures due to long time operation under heavy load. To ensure its reliable operation, in this paper, using wireless sensor network (WSN) technology, a method of posture monitoring for scraper conveyor based on adaptive extended Kalman filter (AEKF) algorithm is proposed to judge whether the scraper conveyor is abnormal. Firstly, the posture monitoring model of scraper conveyor is established, and then an AEKF algorithm is designed. Finally, the performance of the proposed algorithm is verified by simulation. The results show that compared with the traditional extended Kalman filter (EKF) algorithm, the proposed AEKF algorithm is more stable in filtering performance under different environmental noises, and RMSE and MAE are kept below 0.11, which further proves that the proposed method is more suitable for the complex environmental noise conditions with dynamic changes in coal mines, and can meet the accuracy requirements for posture monitoring of scraper conveyors.
关键词
scraper conveyor, WSN, EKF, AEKF, posture
报告人

Xiaodong Yan
China University of Mining and Technology全部评论
重要日期
-
会议日期
11月30日
2022
至12月02日
2022
-
11月30日 2022
初稿截稿日期
-
12月24日 2022
报告提交截止日期
-
04月13日 2023
注册截止日期
主办单位
Harbin Insititute of Technology
China Instrument and Control Society
Heilongjiang Instrument and Control Society
Chinese Institute of Electronics
IEEE I&M Society Harbin Chapter
China Instrument and Control Society
Heilongjiang Instrument and Control Society
Chinese Institute of Electronics
IEEE I&M Society Harbin Chapter
联系方式
- Organizing Committee
- ic******@163.com
历届会议
-
2025年11月21日 中国 Guangzhou
2025 International Conference on Sensing, Measurement & Data Analytics in the era of Artificial Intelligence -
2023年11月02日 中国 China
International Conference on Sensing, Measurement & Data Analytics in the era of Artificial Intelligence -
2023年11月02日 中国 Xi'an
2023 International Conference on Sensing, Measurement & Data Analytics in the era of Artificial Intelligence -
2021年10月21日 中国 Nanjing
2021 International Conference on Sensing, Measurement and Data Analytics in the era of Artificial Intelligence -
2020年10月15日 中国 Xi'an
International Conference on Sensing, Measurement and Data Analytics in the era of Artificial Intelligence


发表评论