报告详情
Multi-task unmanned swarm control method based on dynamic optimal path planning
编号:10
访问权限:公开
更新:2022-12-18 10:53:46
浏览:671次
张贴报告
摘要
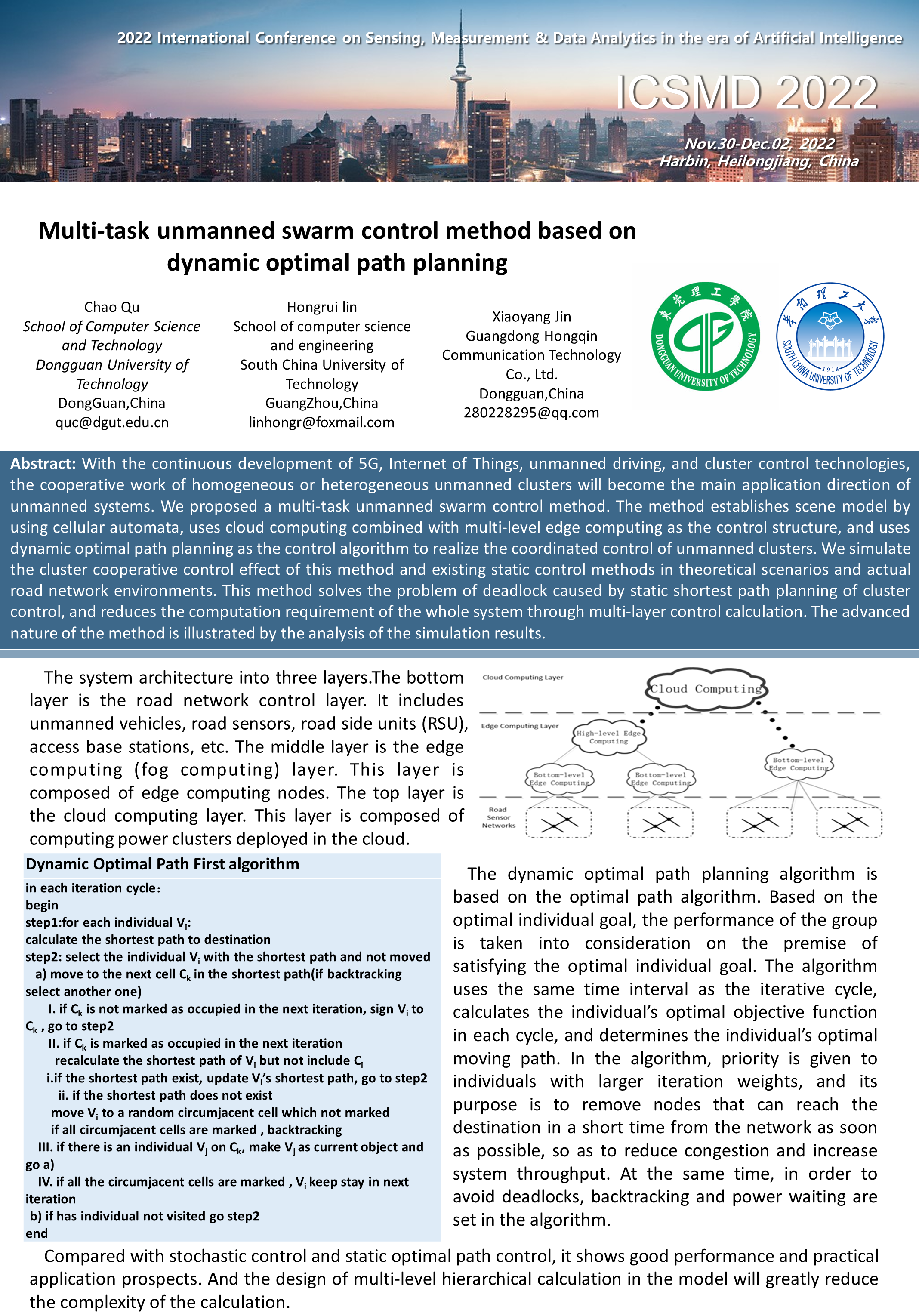
With the continuous development of 5G, Internet of Things, unmanned driving, and cluster control technologies, the cooperative work of homogeneous or heterogeneous unmanned clusters will become the main application direction of unmanned systems. We proposed a multi-task unmanned swarm control method. The method establishes scene model by using cellular automata, uses cloud computing combined with multi-level edge computing as the control structure, and uses dynamic optimal path planning as the control algorithm to realize the coordinated control of unmanned clusters. We simulate the cluster cooperative control effect of this method and existing static control methods in theoretical scenarios and actual road network environments. This method solves the problem of deadlock caused by static shortest path planning of cluster control, and reduces the computation requirement of the whole system through multi-layer control calculation. The advanced nature of the method is illustrated by the analysis of the simulation results.
关键词
swarm control;cellular model;multi-task;dynamic path planning
报告人
Chao Qu
Dongguan University of TechnologyDr. Chao Qu got his Bachelor degree in Computer Science from Xi’an Jiao tong University, China, in 2002 and received his Master degree in Computer Software and Theory from Sun Yat-sen University, China, in 2007. In 2017, he got his doctor degree in Computer Science from South China University of Technology, Guangzhou, China. He is an associate professor in the School of Computer Science and Network Security at Dongguan University of Technology, Dongguan, China. His research interests include computer network, data mining, semantic web and Internet of things.
全部评论
重要日期
-
会议日期
11月30日
2022
至12月02日
2022
-
11月30日 2022
初稿截稿日期
-
12月24日 2022
报告提交截止日期
-
04月13日 2023
注册截止日期
主办单位
Harbin Insititute of Technology
China Instrument and Control Society
Heilongjiang Instrument and Control Society
Chinese Institute of Electronics
IEEE I&M Society Harbin Chapter
China Instrument and Control Society
Heilongjiang Instrument and Control Society
Chinese Institute of Electronics
IEEE I&M Society Harbin Chapter
联系方式
- Organizing Committee
- ic******@163.com
历届会议
-
2025年11月21日 中国 Guangzhou
2025 International Conference on Sensing, Measurement & Data Analytics in the era of Artificial Intelligence -
2023年11月02日 中国 China
International Conference on Sensing, Measurement & Data Analytics in the era of Artificial Intelligence -
2023年11月02日 中国 Xi'an
2023 International Conference on Sensing, Measurement & Data Analytics in the era of Artificial Intelligence -
2021年10月21日 中国 Nanjing
2021 International Conference on Sensing, Measurement and Data Analytics in the era of Artificial Intelligence -
2020年10月15日 中国 Xi'an
International Conference on Sensing, Measurement and Data Analytics in the era of Artificial Intelligence


发表评论