报告详情
Design and electric field analysis of four-split spacer live working robot
编号:380
访问权限:仅限参会人
更新:2022-08-29 16:01:31 浏览:142次
张贴报告
摘要
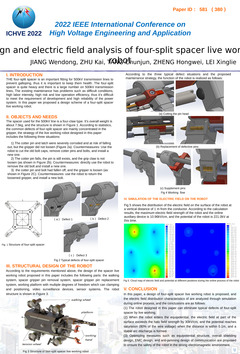
The spacer is one of the most widely used fittings on transmission lines. With the increase of time, the spacers are prone to appear defects such as aging of rubber ring and pin fallen off, causing potential safety hazards. There are problems such as high labor intensity, high risk, low operation efficiency, and poor construction and maintenance process by using manpower to eliminate spacer defects. Therefore, this paper designed a robot that can eliminate spacer defects, through the electric field simulation, the maximum field strength on the surface of the robot is mainly located at the tip of the corner, which may exceed 30kV/cm during the online process. When the distance is within 0.1m, the electric field is much larger than the halo field strength, and a stable arc discharge will be formed. Therefore,the electrical part of the robot must use a shielded chassis, the incoming and outgoing cables should be shielded. The metal should be well connected, and the discharge gap should be calculated between different metals with isolation, and the capacitance between the circuit board and the casing should be minimized.
.
.
关键词
spacers,liveworking,Robot,electric field distribution
报告人

Xinglie LEI
R & D Engineer China Electric Power Research Institute稿件作者
全部评论
重要日期
-
会议日期
09月25日
2022
至09月29日
2022
-
08月15日 2022
提前注册日期
-
09月10日 2022
报告提交截止日期
-
11月10日 2022
注册截止日期
-
11月30日 2022
初稿截稿日期
-
11月30日 2022
终稿截稿日期
主办单位
IEEE DEIS
承办单位
Chongqing University
联系方式
- Zhengyong Huang
- 61******@qq.com
历届会议
-
2020年09月06日 中国 Beijing
2020 IEEE International Conference on High Voltage Engineering and Application -
2018年09月10日 希腊
2018 IEEE International Conference on High Voltage Engineering and Application -
2016年09月19日 中国 Chengdu, China
2016 IEEE International Conference on High Voltage Engineering and Application


发表评论